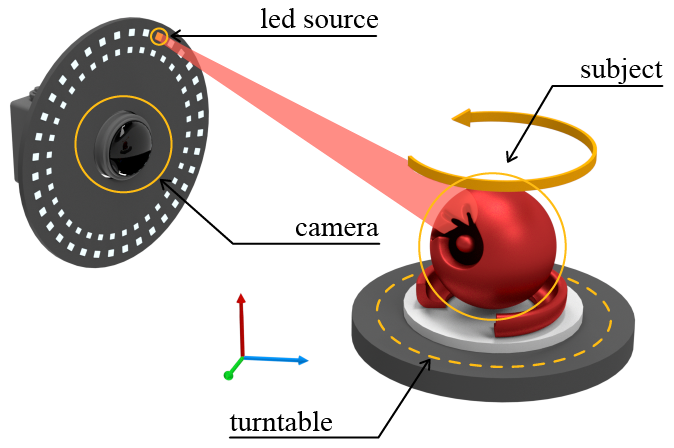
Multi-View Photometric Stereo Setup
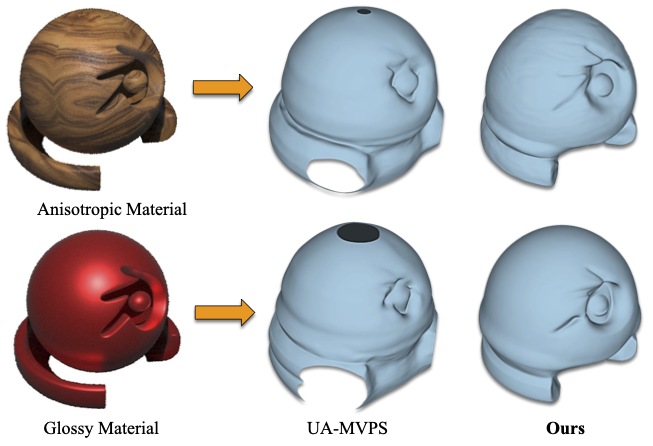
Benefit of our Approach





@inproceedings{kaya2023multi,
title={Multi-View Photometric Stereo Revisited},
author={Kaya, Berk and Kumar, Suryansh and Oliveira, Carlos and Ferrari, Vittorio and Van Gool, Luc},
booktitle={Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision},
pages={3126--3135},
year={2023}
}

This work was funded by Focused Research Award from Google(CVL, ETH 2019-HE-318, 2019-HE-323, 2020-FS-351, 2020-HS-411). Suryansh Kumar's project is supported by "ETH Zurich Foundation and Google" for bringing together best academic and industrial research.